ラズベリーパイPico Wで270°サーボモータを動かしてみよう

ラズベリーパイPico Wで270°サーボモータを動かしてみます。
今回の記事ではPWM(パルス幅変調)を利用します。
PWMに関してはMakeCodeのPWMで270°サーボモータを動かしてみようをご覧ください。
今回使用する270°サーボモータはGeekServo 9G Servo-Grayを使用します。
回転角は-45°〜225°になります。
GeekServo 9G Servo-Gray — スイッチサイエンス
今回使用するサーボモータは下記の仕様になります。
周波数が50Hzの時に
・最小のデューティ比が2.5%
・中間のデューティ比が7.25%
・最大のデューティ比が12%
になり、モータの回転角は
・デューティ比 2.5%では回転角は-45°
・デューティ比 7.25%では回転角は90°
・デューティ比 12%では回転角は225°
になります。
早速、ラズベリーパイPico Wとサーボモータを繋げてみます。
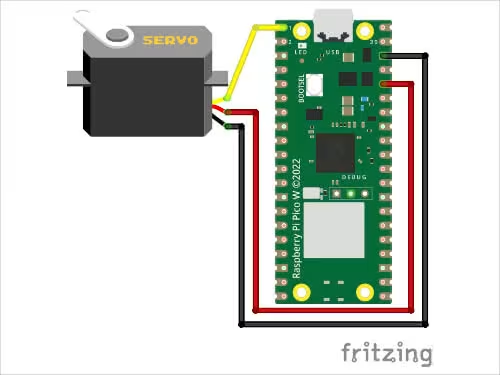
※左がラズベリーパイPico W、右がサーボモータ
GPIOピン0 → オレンジ(上の図では黄色)
3V → 赤
0V(GND) → 茶色(上の図では黒)
※ラズベリーパイPico WのGPIOピンの配置は下記のリンク先のページを参考にしてください。
RP2 用クイックリファレンス — MicroPython latest ドキュメント
マイコンとモータをジャンパー線で繋ぐ時、最初からピンがハンダ付けされているラズベリーパイPico HやラズベリーパイPico WHを使用すると簡単に試すことができます。
Raspberry Pi Pico H — スイッチサイエンス
Raspberry Pi Pico WH — スイッチサイエンス
次にラズベリーパイPico W用のコードを作成します。
import machine
import time
# デューティ比を%表記から0〜65535の間の値に変換する
def dutyRate2u16(dutyRate):
return int(65535*dutyRate/100)
pwm = machine.PWM(machine.Pin(0))
pwm.freq(50)
# デューティ比 7.5% 回転角は90°
pwm.duty_u16(dutyRate2u16(7.5))
time.sleep(1)
# デューティ比 2.5% 回転角は-45°
pwm.duty_u16(dutyRate2u16(2.5))
time.sleep(1)
# デューティ比 12% 回転角は225°
pwm.duty_u16(dutyRate2u16(12))
time.sleep(1)
# デューティ比 7.5% 回転角は90°
pwm.duty_u16(dutyRate2u16(7.5))
※PWM (パルス幅変調) - RP2 用クイックリファレンス — MicroPython latest ドキュメント
コードをフラッシングしたら、実行してサーボモータが意図通りに動くか確認してみましょう。
- ラズベリーパイPico Wを使ってみる
- ラズベリーパイPico Wを初期化する
- ラズベリーパイPico WでHTTPリクエストを送信してみる
- ラズベリーパイPico WでHTTPのPOSTで値を送信してみる
- ラズベリーパイPico WでHTTPのサーバを構築してみる
- ラズベリーパイPico WでHTTPリクエストでLEDを点灯できるようにしてみる
- AndroidでラズベリーパイPico WからのHTTPリクエストを受信する
- ラズベリーパイPico WでBluetoothを使ってみる
- PythonでSerial Bluetooth Terminalの動作を再現してみる
- ラズベリーパイPico WでBluetoothのセントラル機器を構築してみる
- ラズベリーパイPico WでBluetooth接続を介してLチカをしてみる
- ラズベリーパイPico W同士をBluetooth接続してLチカをしてみる
- ラズベリーパイPico WとモータドライバでDCモータを動かしてみよう
- ラズベリーパイPico Wを介してブルートゥースでDCモータを制御してみよう
- ラズベリーパイPico W同士をブルートゥースで接続してDCモータを制御してみよう
- ラズベリーパイPico Wで270°サーボモータを動かしてみよう
- クロームブックでラズベリーパイとファイルの共有を行う
- シリアルコンソール経由でラズベリーパイを操作する
- LANケーブル経由でラズベリーパイを操作する
- クロームブックでFTP操作の代替のファイルアプリにマウントを利用する
- クロームブックでSFTPでファイルの転送を行う
- クロームブックで公開鍵認証でラズベリーパイにリモートアクセスする
- ラズベリーパイゼロ2W
- ラズベリーパイのスワップを変更する
- ターミナルからラズベリーパイPicoにコードをフラッシングする