Microbit Moreの水準器を使ってスプライトを移動してみる
マイクロビットには水準器というセンサーがあります。
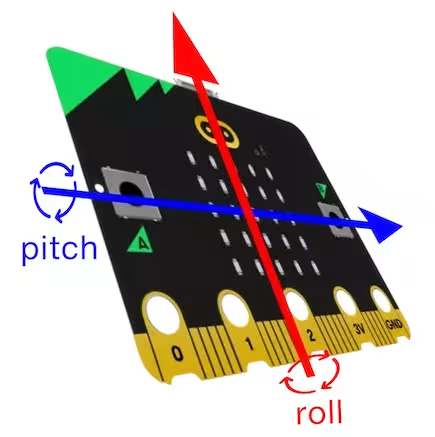
※画像:水準器 | micro:bit
水準器には横方向がどれほど傾いたか?を感知するロール(roll)と縦方向を感知するピッチ(pitch)があります。
この水準器を使用してネコのスプラウトを動かしてみます。
はじめに水準器からどのような値を得られるのか?を調べる為に下記のコードを試してみます。

○と○のブロックを使用して、文字列を連結してみます。
このコードを実行してみると、
ネコがマイクロビットから得られたロールとピッチの値を教えてくれます。
次に水準器から得られた値を元にネコを動かせるようにしてみます。

マイクロビットの水準器から得られたデータをそのままx座標とy座標に加算します。
水準器の値でy座標の方は上下逆になりますので、-1をかけて値を反転させておきます。
早速、このコードを実行してみますと、
意図通りの動作になったように見えますが、ネコの動きが速すぎて制御が大変です。
ここでネコの移動速度を緩めてみます。

ロールとピッチの各々の値に10を割って数字を小さくしてみます。
このコードを実行してみますと,
ネコの動きが穏やかになり、制御しやすくなりました。
あとはマイクロビットが少しだけ傾いている時はネコは動かないようにするといった処理も必要になってきますが、それは挑戦してみてください。
同じカテゴリーの記事
- MakeCodeでコードを書いてみよう
- MakeCodeのConnect deviceができない時の対応
- micro:bit Python Editorでコードを書いてみよう
- MakeCodeのShow data デバイスを使ってみよう
- micro:bit Python Editorのシリアルを表示を使ってみよう
- マイクロビットの無線通信の受信機側の値の取り扱い方を調べる
- マイクロビットの無線通信で常に新しい値を取得してみる
- マイクロビットの無線通信で信号の強度を変えながら値を送信してみる
- MakeCodeで潜水艦が潜るアニメーションのコードを書いてみよう
- MicroPythonで潜水艦が潜るアニメーションのコードを書いてみよう
- MicroPythonでヨットが横に移動するアニメーションのコードを書いてみよう
- MakeCodeでボタンAを押した時だけアイコンを表示してみよう
- MicroPythonでボタンAを押した時だけアイコンを表示してみよう
- マイクロビットからのシリアル通信をラズベリーパイで受信してみる
- MakeCodeでLチカをしてみよう
- MicroPythonでLチカをしてみよう
- pokitMeterでマイクロビットから発生する電流等を測定してみよう
- MakeCodeでLEDの明るさを徐々に変えてみよう
- MicroPythonでLEDの明るさを徐々に変えてみよう
- MakeCodeで270°サーボモータを動かしてみよう
- MakeCodeのPWMで270°サーボモータを動かしてみよう
- MicroPythonで270°サーボモータを動かしてみよう
- MicroPythonで360°サーボモータを動かしてみよう
- マイクロビットとモータドライバでDCモータを動かしてみよう
- ブレットボードを使ってみよう
- CdSセルとマイクロビットのAD変換で明るさを測定してみよう
- マイクロビットとタクトスイッチでプルダウン抵抗について触れてみる
- マイクロビットとタクトスイッチでプルアップ抵抗について触れてみる
- マイクロビットでUARTを使ってみる
- マイクロビットでI2C電子ペーパモジュールを使ってみる
- マイクロビットとI2C電子ペーパモジュールでデジタル温度計を造ってみる
- マイクロビットでSPIカラー電子ペーパモジュールを使ってみる
- スクラッチにマイクロビットを繋げてコードを書いてみる
- Microbit Moreとマイクロビットを繋げてコードを書いてみる
- :GAME ZIP 64でMicrobit Moreを動かしてみる
- :GAME ZIP 64とMicrobit Moreでマリオ風の操作をできるようにする
- Microbit Moreで明るさセンサーを使ってみる
- Microbit Moreの水準器を使ってスプライトを移動してみる
- Microbit Moreでマイクを使ってみる
- Microbit Moreでボールの発射ボタンを作ってみる
- マイクロビットをブルートゥースの子機(ペリフェラル)にしてみる
- ターミナルからマイクロビットにコードをフラッシングする