マイクロビットとモータドライバでDCモータを動かしてみよう
マイクロビットでDCモータを動かしてみます。
DCモータの詳細に触れる前に今回使用するものを挙げておきます。
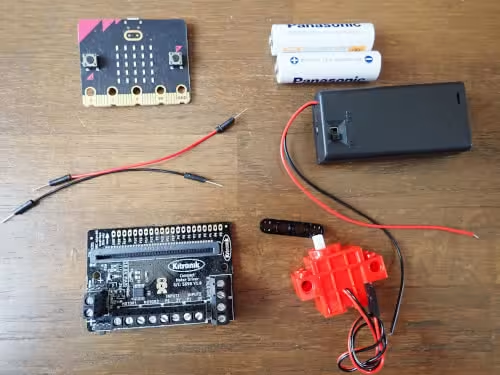
マイクロビット × 1
GeekServo 9G Motor-Red × 1
GeekServo 9G Motor-Red — スイッチサイエンス
micro:bit用小型モータドライバ × 1
micro:bit用小型モータドライバ — スイッチサイエンス
単三電池2本 スイッチ付き電池ボックス × 1
単三電池2本 スイッチ付き電池ボックス — スイッチサイエンス
ジャンパワイヤ(オス〜オス) × 2
単三電池 × 2
MakeCodeで270°サーボモータを動かしてみようでサーボモータを動かす時にマイクロビットに直接繋ぎましたが、DCモータをサーボモータのように動かす時はモータドライバを介して接続する必要があります。
モータドライバを自作するのは難しいので今回は、
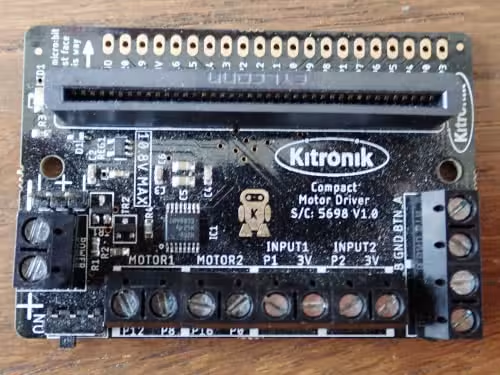
Kitronik製のマイクロビット用のモータドライバを使用します。
micro:bit用小型モータドライバ — スイッチサイエンス
最初にDCモータの単純な動作から見ていきます。

DCモータは2つの配線に繋ぐことになっていまして、一つはプラス極でもう一つはマイナス極になります。
赤と黒の線がありますが、どちら一方にプラス極を繋いでも、もう一方がマイナス極になれば問題なく動作します。
今回のモータドライバにはDCモータにマイコンの制御ではない繋ぎ方を行う事ができますので、最初にDCモータが動作する事を確認します。

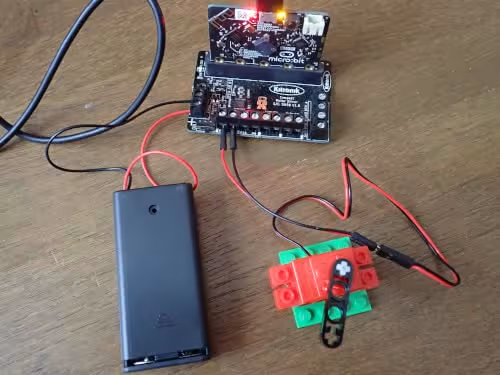
上の写真のようにモータドライバに電池ボックスを繋ぎ、電池ボックスに単三電池を入れます。

モータドライバの左側にあるREDの箇所に電池ボックスの赤いワイヤを繋ぎ、BLKの箇所に黒いワイヤを繋ぎます。
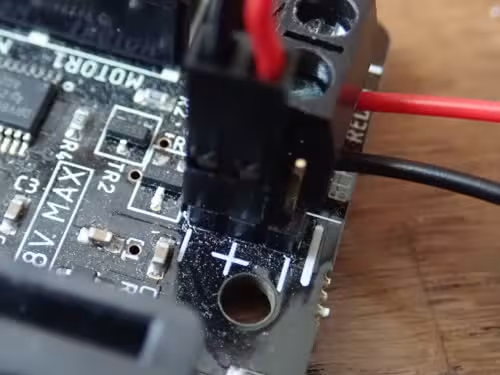
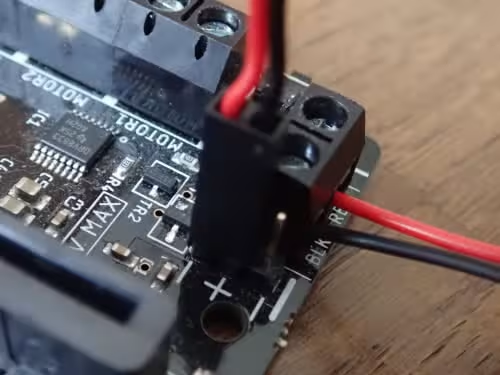
電池ボックスを繋いだ箇所のすぐ近くに − + − の表記がある箇所がありますので、ここにDCモータを繋いでみます。
DCモータの赤いワイヤを + に、黒いワイヤを − に繋ぎます。
電池ボックスにあるスイッチをONにすると、
上の動画のように時計回りで回り始めます。
電池ボックスのスイッチをOFFにして、
DCモータとモータドライバの繋ぎ方をDCモータの黒いワイヤを + に、赤いワイヤを − に繋ぎ変えてみて、電池ボックスのスイッチをONにすると、
半時計回りで回り始めます。
DCモータをモータドライバに繋いでみます。
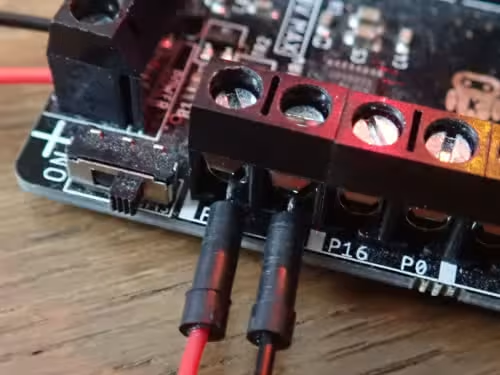
MOTOR1の箇所のP12に赤いワイヤ、P8に黒いワイヤを繋ぎます。
P12はモータを右回り、P8は左回りに関与するGPIOピンになります。
上記内容を考慮して、マイクロビットのAボタンを押した時に右回り、Bボタンを押した時に左回りに回転させるコードを作成してみます。
from microbit import * while True: if button_a.is_pressed(): pin12.write_digital(1) pin8.write_digital(0) elif button_b.is_pressed(): pin12.write_digital(0) pin8.write_digital(1)
DCモータにHIGHを送信するとモータは回転し、LOWにするとモータは停止します。
上記コードをマイクロビットにフラッシングし、
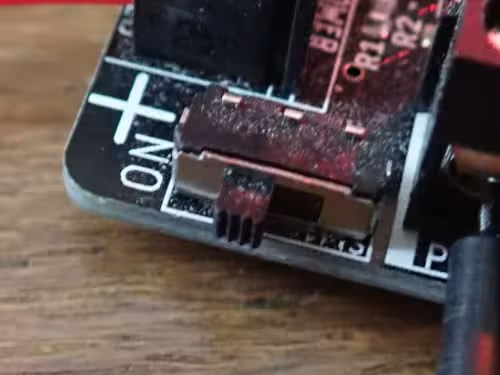
電池ボックスのスイッチとモータドライバのスイッチをONにして、各ボタンを押してみると、
意図通りの動作になりました。
DCモータの回転速度を遅くしたい場合は、
pin12.write_digital(1)
の箇所を
pin12.write_analog(512)
のようにアナログ値(PWM)で指定すれば良いです。
アナログ値は 0 〜 1023までの値で指定できます。
追記
今回紹介しましたモータドライバはDCモータを二個接続できますが、四個のDCモータを接続したい場合は、Kitronik製のロボティクスボードがおすすめです。
micro:bit用 Robotics Board — スイッチサイエンス
- MakeCodeでコードを書いてみよう
- MakeCodeのConnect deviceができない時の対応
- micro:bit Python Editorでコードを書いてみよう
- MakeCodeのShow data デバイスを使ってみよう
- micro:bit Python Editorのシリアルを表示を使ってみよう
- MakeCodeでボタンを試してみよう
- マイクロビットの無線通信の受信機側の値の取り扱い方を調べる
- マイクロビットの無線通信で常に新しい値を取得してみる
- マイクロビットの無線通信で信号の強度を変えながら値を送信してみる
- MakeCodeで潜水艦が潜るアニメーションのコードを書いてみよう
- MicroPythonで潜水艦が潜るアニメーションのコードを書いてみよう
- MicroPythonでヨットが横に移動するアニメーションのコードを書いてみよう
- MakeCodeでボタンAを押した時だけアイコンを表示してみよう
- MicroPythonでボタンAを押した時だけアイコンを表示してみよう
- MakeCodeでメインループに触れてみよう
- MicroPythonでメインループのコードを書いてみよう
- MicroPythonのメインループ内でいろんなアイコンを表示できるようにしてみよう
- マイクロビットからのシリアル通信をラズベリーパイで受信してみる
- MakeCodeで変数を使ってみよう
- MicroPythonで変数を使ってみよう
- MakeCodeで変数で記録出来る数値に範囲を設けよう
- MicroPythonで変数で記録出来る数値に範囲を設けよう
- 変数のフラグとしての使い方について見てみよう
- 変数のトグルとしての使い方について見てみよう
- 配列を使って行動を記録してみよう
- 配列を使ってスロットゲームを作ろう
- 磁力センサーを使ってみる
- 磁力センサーで得られる値を確認してみよう
- MakeCodeでLチカをしてみよう
- MicroPythonでLチカをしてみよう
- pokitMeterでマイクロビットから発生する電流等を測定してみよう
- MakeCodeでLEDの明るさを徐々に変えてみよう
- MicroPythonでLEDの明るさを徐々に変えてみよう
- MakeCodeで明るさセンサーで暗くなったらLEDを点灯してみよう
- MicroPythonで明るさセンサーで暗くなったらLEDを点灯してみよう
- 自作スイッチを作ってみよう
- MakeCodeで270°サーボモータを動かしてみよう
- MakeCodeのPWMで270°サーボモータを動かしてみよう
- MicroPythonで270°サーボモータを動かしてみよう
- MicroPythonで360°サーボモータを動かしてみよう
- マイクロビットとモータドライバでDCモータを動かしてみよう
- ブレットボードを使ってみよう
- マイクロビットでLCDキャラクターディスプレイを使ってみる
- マイクロビットのMicroPythonのバージョンを確認する
- 3色のLEDを並べて信号機を作ろう
- RGBフルカラーLEDで色々な色で点灯してみよう
- 関数を利用してRGBフルカラーLEDのコードを整理してみよう
- 関数の引数を使って、関数の呼び出し時に値を指定して実行してみよう
- 関数で似たような処理はまとめて一つの関数にしてみよう
- CdSセルとマイクロビットのAD変換で明るさを測定してみよう
- マイクロビットとタクトスイッチでプルダウン抵抗について触れてみる
- マイクロビットとタクトスイッチでプルアップ抵抗について触れてみる
- マイクロビットでUARTを使ってみる
- マイクロビットでI2C電子ペーパモジュールを使ってみる
- マイクロビットとI2C電子ペーパモジュールでデジタル温度計を造ってみる
- マイクロビットでSPIカラー電子ペーパモジュールを使ってみる
- スクラッチにマイクロビットを繋げてコードを書いてみる
- Microbit Moreとマイクロビットを繋げてコードを書いてみる
- :GAME ZIP 64でMicrobit Moreを動かしてみる
- :GAME ZIP 64とMicrobit Moreでマリオ風の操作をできるようにする
- Microbit Moreで明るさセンサーを使ってみる
- Microbit Moreの水準器を使ってスプライトを移動してみる
- Microbit Moreでマイクを使ってみる
- Microbit Moreでボールの発射ボタンを作ってみる
- マイクロビットをブルートゥースの子機(ペリフェラル)にしてみる
- ターミナルからマイクロビットにコードをフラッシングする
- マイクロビットの無線機能で早押しゲームを作ってみよう
- マイクロビットの無線機能でじゃんけんを作ってみよう
- Web Serial APIでマイクロビットを動かしてみよう
- Web Serial APIとマイクロビットでキーボードで演奏をしてみよう
- Web Serial APIでマイクロビットからパソコンを操作してみよう
- マイクロビットで赤外線反射センサーを使ってみよう:DO
- マイクロビットで赤外線反射センサーを使ってみよう:AO