MicroPythonで360°サーボモータを動かしてみよう

マイクロビットと360°サーボモータを繋いで、マイクロビットからモータを制御してみます。
サーボモータについてはMakeCodeで270°サーボモータを動かしてみようで角度指定を行える270°サーボモータに付いて触れましたが、
今回のサーボモータはラジコンのタイヤのように回すものになります。
今回のモータはGeekServo 9G 360° Motor-Orangeを使っています。
GeekServo 9G 360° Motor-Orange — スイッチサイエンス
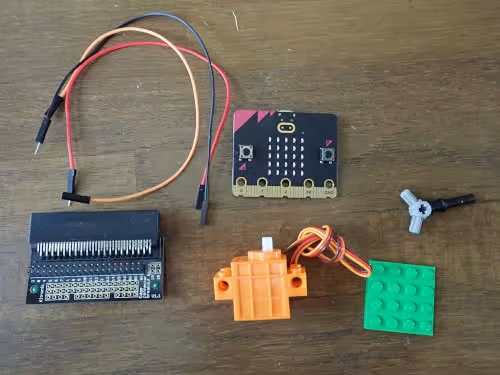
マイクロビットとサーボモータの繋ぎ方はMakeCodeで270°サーボモータを動かしてみようと同じようにします。
※左がマイクロビット、右がサーボモータ
GPIOピン0 → オレンジ
3V → 赤
0V(GND) → 茶色
先にサーボモータの仕様を確認します。
今回のサーボモータではPWMを用い、周波数50Hzに対して、デューティ比が2.5〜12.5%まで受け付けます。
PWMやデューティ比に関してはMakeCodeのPWMで270°サーボモータを動かしてみようをご覧ください。
デューティ比が7.5%の時がモータの停止になります。
2.5〜7.5%までがモータが時計回りになり、デューティ比が小さい程、モータは速く回転します。
7.5〜12.5%までがモータが半時計回りになり、デューティ比が大きい程、モータは速く回転します。
上記の内容を踏まえ、Aボタンを押したら時計回り、Bボタンを押したら半時計周りになるようにコードを作成します。
MicroPythonの
pin0.write_analog(duty)
は0〜1023の値の範囲になりますので、最小のデューティ比 2.5%の場合、アナログ値は1023 * 0.025 ≒ 26になります。
この内容を踏まえた上で、下記のコードを作成します。
from microbit import * # 50Hz(20ms) pin0.set_analog_period(20) while True: if button_a.is_pressed() and button_b.is_pressed(): # モータの停止 pin0.write_analog(76) sleep(1000) elif button_a.is_pressed(): # 時計回り pin0.write_analog(26) elif button_b.is_pressed(): # 半時計回り pin0.write_analog(126)
マイクロビットにフラッシングして、動作を確認してみますと、
のようにモータが回転します。
MakeCodeで今回のサーボモータを使う時、
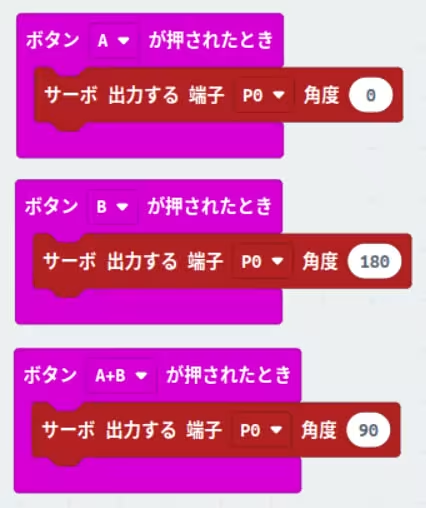
にすれば、MicroPythonで作成したコードと同じように動作します。
- MakeCodeでコードを書いてみよう
- MakeCodeのConnect deviceができない時の対応
- micro:bit Python Editorでコードを書いてみよう
- MakeCodeのShow data デバイスを使ってみよう
- micro:bit Python Editorのシリアルを表示を使ってみよう
- MakeCodeでボタンを試してみよう
- マイクロビットの無線通信の受信機側の値の取り扱い方を調べる
- マイクロビットの無線通信で常に新しい値を取得してみる
- マイクロビットの無線通信で信号の強度を変えながら値を送信してみる
- MakeCodeで潜水艦が潜るアニメーションのコードを書いてみよう
- MicroPythonで潜水艦が潜るアニメーションのコードを書いてみよう
- MicroPythonでヨットが横に移動するアニメーションのコードを書いてみよう
- MakeCodeでボタンAを押した時だけアイコンを表示してみよう
- MicroPythonでボタンAを押した時だけアイコンを表示してみよう
- MakeCodeでメインループに触れてみよう
- MicroPythonでメインループのコードを書いてみよう
- MicroPythonのメインループ内でいろんなアイコンを表示できるようにしてみよう
- マイクロビットからのシリアル通信をラズベリーパイで受信してみる
- MakeCodeで変数を使ってみよう
- MicroPythonで変数を使ってみよう
- MakeCodeで変数で記録出来る数値に範囲を設けよう
- MicroPythonで変数で記録出来る数値に範囲を設けよう
- 変数のフラグとしての使い方について見てみよう
- 変数のトグルとしての使い方について見てみよう
- 磁力センサーを使ってみる
- 磁力センサーで得られる値を確認してみよう
- MakeCodeでLチカをしてみよう
- MicroPythonでLチカをしてみよう
- pokitMeterでマイクロビットから発生する電流等を測定してみよう
- MakeCodeでLEDの明るさを徐々に変えてみよう
- MicroPythonでLEDの明るさを徐々に変えてみよう
- MakeCodeで明るさセンサーで暗くなったらLEDを点灯してみよう
- MicroPythonで明るさセンサーで暗くなったらLEDを点灯してみよう
- 自作スイッチを作ってみよう
- MakeCodeで270°サーボモータを動かしてみよう
- MakeCodeのPWMで270°サーボモータを動かしてみよう
- MicroPythonで270°サーボモータを動かしてみよう
- MicroPythonで360°サーボモータを動かしてみよう
- マイクロビットとモータドライバでDCモータを動かしてみよう
- ブレットボードを使ってみよう
- マイクロビットでLCDキャラクターディスプレイを使ってみる
- マイクロビットのMicroPythonのバージョンを確認する
- 3色のLEDを並べて信号機を作ろう
- RGBフルカラーLEDで色々な色で点灯してみよう
- 関数を利用してRGBフルカラーLEDのコードを整理してみよう
- 関数の引数を使って、関数の呼び出し時に値を指定して実行してみよう
- 関数で似たような処理はまとめて一つの関数にしてみよう
- CdSセルとマイクロビットのAD変換で明るさを測定してみよう
- マイクロビットとタクトスイッチでプルダウン抵抗について触れてみる
- マイクロビットとタクトスイッチでプルアップ抵抗について触れてみる
- マイクロビットでUARTを使ってみる
- マイクロビットでI2C電子ペーパモジュールを使ってみる
- マイクロビットとI2C電子ペーパモジュールでデジタル温度計を造ってみる
- マイクロビットでSPIカラー電子ペーパモジュールを使ってみる
- スクラッチにマイクロビットを繋げてコードを書いてみる
- Microbit Moreとマイクロビットを繋げてコードを書いてみる
- :GAME ZIP 64でMicrobit Moreを動かしてみる
- :GAME ZIP 64とMicrobit Moreでマリオ風の操作をできるようにする
- Microbit Moreで明るさセンサーを使ってみる
- Microbit Moreの水準器を使ってスプライトを移動してみる
- Microbit Moreでマイクを使ってみる
- Microbit Moreでボールの発射ボタンを作ってみる
- マイクロビットをブルートゥースの子機(ペリフェラル)にしてみる
- ターミナルからマイクロビットにコードをフラッシングする
- マイクロビットの無線機能で早押しゲームを作ってみよう
- マイクロビットの無線機能でじゃんけんを作ってみよう
- Web Serial APIでマイクロビットを動かしてみよう
- Web Serial APIでマイクロビットからパソコンを操作してみよう
- マイクロビットで赤外線反射センサーを使ってみよう:DO
- マイクロビットで赤外線反射センサーを使ってみよう:AO