/** Geminiが自動生成した概要 **/
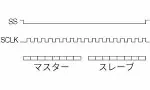
本稿では、SPI通信におけるSSとSCLKの役割を解説しています。SSはスレーブ選択信号で、LOWにすることで特定のスレーブとの通信を有効化します。SCLKはクロック信号であり、この規則的なHIGH/LOW変化を基準に同期してMOSI/MISOでのデータ送受信が行われます。
具体的には、SS1をLOWにし、SCLK信号に合わせてデータ送受信を行う例を図解で示しています。
今回のSPI通信解説により、以前の記事で扱ったESP8266,Raspberry Piを用いたソケット通信やUARTと合わせて、IoTにおけるセンサーデータ取得から遠隔地への送信までの仕組みの理解が深まります。