
/** Geminiが自動生成した概要 **/
SPI通信のモードは、クロック極性(CPOL)とクロック位相(CPHA)の組み合わせで決まります。CPOLはクロックのアイドル状態(0か1)を、CPHAはデータ取得がクロックの立ち上がり edge か、立ち下がり edge かを示します。組み合わせは4種類あり、モード0(CPOL=0, CPHA=0)からモード3(CPOL=1, CPHA=1)まで存在します。
/** Geminiが自動生成した概要 **/
SPI通信のモードは、クロック極性(CPOL)とクロック位相(CPHA)の組み合わせで決まります。CPOLはクロックのアイドル状態(0か1)を、CPHAはデータ取得がクロックの立ち上がり edge か、立ち下がり edge かを示します。組み合わせは4種類あり、モード0(CPOL=0, CPHA=0)からモード3(CPOL=1, CPHA=1)まで存在します。

/** Geminiが自動生成した概要 **/
この記事では、UART通信におけるボーレートについて解説しています。ボーレートとは、1秒間に送受信するデータビット数を表し、送受信側で一致させる必要があります。
記事では、一般的なボーレートの値として9600、115200などを紹介し、Micro:bitとRaspberry Piを接続する際のコードを例に、送受信側でボーレートを合わせる必要があることを説明しています。
UARTは非同期通信のため、クロック信号を用いずにデータを送受信します。そのため、ボーレートを合わせることでデータの整合性を保っています。
/** Geminiが自動生成した概要 **/
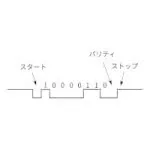
この記事は、micro:bitのMicroPythonを使ってUART通信の基礎を解説しています。UARTではHIGH(1)とLOW(0)の信号でデータを送受信し、文字列をバイト型に変換して送信します。
記事では、データ送信の仕組みとして、アイドル状態(1)、スタートビット(0)、データビット、パリティビット、ストップビット(1)からなるシリアル通信の構造を図解で説明しています。
特に、パリティビットはデータ送信時の誤り検出符号として、奇パリティと偶パリティがあることを解説し、micro:bitでの設定方法にも触れています。
最後に、ボーレートについても触れる予定としていますが、詳細は次回に持ち越しとなっています。
/** Geminiが自動生成した概要 **/
この記事は、UARTを用いたシリアル通信について解説しています。
UARTとは何か、Raspberry Piとmicro:bitを接続した図を例に、TXピンとRXピンを用いてどのようにデータがやり取りされるのかを説明しています。
具体的には、文字列"abc"をUART通信で送信する際に、コンピュータ内部では文字コードを用いて処理されていることを解説し、Go言語でのバイト型変換例を示しています。
さらに、microbitのUART設定における"bits=8"というパラメータを取り上げ、1ビットと8ビットの関係、表現できる数値範囲について触れています。
最後に、"0x610x620x63"という16進数表記で送信データ例を示し、次回にuart.initのパラメータ解説を行うことを予告しています。

/** Geminiが自動生成した概要 **/
この記事は、ESP8266をUARTの受信側としてRaspberry Piと通信する方法を解説しています。
前回の記事ではESP8266から送信したデータにREPLの情報が含まれていましたが、今回は受信側にすることでREPL情報を含まないデータを受信できることを確認しています。
具体的には、ESP8266側で受信したデータを少し変更してRaspberry Piに送り返すPythonコードを記述し、Raspberry Pi側では"send from pi."というメッセージを繰り返し送信するPythonコードを記述しています。
その結果、Raspberry Pi側で"received:send from pi."というメッセージが表示され、REPL情報を含まないデータが受信できていることが確認できました。
/** Geminiが自動生成した概要 **/
BBC Micro:bit (microbit) の UART 通信では、microbit から Raspberry Pi へのデータ送信と、その逆の受信が可能。microbit は `uart.any()` 関数を使用して受信データを待ち受け、Raspberry Pi はシリアルポートを介して通信する。データの送受信を確実に行うには、microbit と Raspberry Pi 間の TX/RX ピンの正しい接続と、双方で一致するボーレートの設定が重要。また、microbit では `uart.init(115200)` を使用してシステムを初期化することも推奨される。これらの手順に従うことで、microbit と Raspberry Pi 間の双方向 UART 通信を実現できる。

/** Geminiが自動生成した概要 **/
Micro:bitとサーボモーターを使って環境制御の基礎を学ぶ記事。サーボモーターの角度制御をMicro:bitのプログラムから行う方法を紹介。Muエディタを使用し、角度を指定するシンプルなコードから、連続的な動きや特定角度への移動、アナログ入力による制御まで段階的に解説。具体的な接続方法やコード例、ライブラリの活用法も示し、初心者にも分かりやすくサーボモーター制御の基礎を習得できる内容となっている。最終的には、植物育成ライトの角度調整といった具体的な応用例も示唆し、環境制御への応用を促している。