/** Geminiが自動生成した概要 **/
記事では、PokitMeterという小型測定器を用いて、Micro:bit(マイクロビット)が出力するPWM信号の周波数を測定しています。
PokitMeterは測定結果をスマホで確認できるため非常にコンパクトで、Chromebookでも使用可能です。
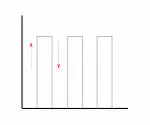
マイクロビットのP0ピンから出力されるPWM信号をPokitMeterのオシロスコープモードで測定した結果、デューティ比50%で、周期20msの矩形波が観測されました。
このことから、マイクロビットのPWM周波数は標準で50Hzであることが分かります。
今後はPokitMeterを活用して、より深くマイクロビットの機能を探求していく予定です。