トランジスタ4増幅率までの記事で、電流信号という名称を頻繁に見かけたので、このワードを基にして色々と検索をしてみたら、4-20mAという表記をたくさん見かけた。
4-20mAというのは、電流による制御信号の出力範囲が4〜20mAの範囲で出力されるという意味らしい。
4-20mAとは? | 電流計測(4-20mA編) | 計測器ラボ | キーエンス
一昔前の制御信号は電圧を使っていたらしいが、4-20mA電流信号の方がノイズに強く、長距離伝送も行えるそうだ。
Raspberry Piはどうなっているのだろう?と調べてみたら、電子工作 パーフェクトガイド | 株式会社誠文堂新光社の本の136ページにRaspberry PiのGPIOから出力される信号は3.3Vで16mAと記載されていた。
Raspberry PiのPWMでサーボモータを動かしてみるの記事等で触れたモジュールの制御の為に接続したGPIOピンの電流は4-20mAの範囲だったということになる。
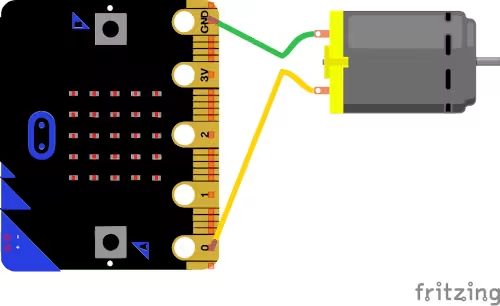
前回のBBC Micro:bitでDCモータを動かしたいの記事で、3VとGNDに接続した時はモータが動いたが、0 ピンとGNDの場合はモータが動かなかった事が腑に落ちた。

であれば、目的であるGeekServo 9g motor-redを電流信号で動かす為にはトランジスタをどのように接続すれば良いのだろうか?
マイクロビットから出力される電流信号を仮に10mAだとして、どれくらいに増幅してモータに送れば良いのか?
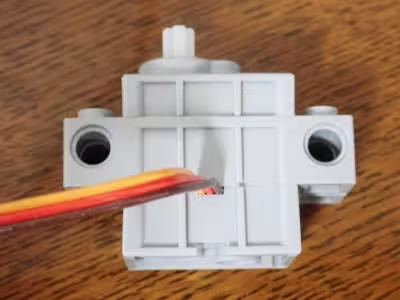
GeekServo 9G Motor-Red - スイッチサイエンスのページによると、
/************************************************/
3.3 V
- 無負荷時速度(r/min): 70 ± 10 %
- 無負荷時電流(mA): ≦ 100
- ストール時トルク(G): ≧ 400
- ストール時電流(mA): ≦ 550
/************************************************/
と記載されているので、100 〜 500 mAの範囲にすれば良い?
モータのストール時とはどういう意味だ?
トランジスタをかます前に、用語を一つずつ整理していく必要がありそうだ。