/** Geminiが自動生成した概要 **/
Raspberry PiにScratch3.0の開発環境を構築する方法を解説しています。
Node.jsのバージョンはScratch3.0との互換性のため14.20.1を使用し、パッケージ管理にはYarnを採用しています。
まずNode.jsとnpmをインストール後、nを使ってNode.jsのバージョンを管理します。次に、scratch-vmとscratch-guiのリポジトリをクローンし、yarn linkとyarn installコマンドで依存関係を解決します。
最後にyarn startコマンドでVMを起動し、ブラウザからhttp://localhost:8601/ にアクセスするとScratch3.0の画面が表示されます。
記事ではyarn installに時間がかかること、エラーが発生しても問題ない場合があることなど、注意点も解説されています。
最近興味があることや肥料教室についてのメルマガを配信しています
検索キーワード:「Raspberry Pi OS」
Raspberry PiでScratch3.0の開発環境を構築する
Minecraft: Pi Edition: RebornのSDKを使ってみる
/** Geminiが自動生成した概要 **/
Minecraft: Pi Edition: Reborn (MCPI) の拡張SDKを使い、ターミナルに"Helloworld"を出力する手順を紹介しています。
まずMCPI++ 2.4.3-3をインストールし、C++コンパイラなどの開発環境を整えます。
次に、"Helloworld"を出力するコードを記述した"hello.cpp"を作成し、共有ライブラリとしてコンパイル、MCPIのmodsディレクトリに配置します。
MCPIを実行すると、起動時に"Helloworld"が出力されます。これは、共有ライブラリ内の特定の関数がエントリポイントとして機能するためです。
記事では最後に、ゲーム画面に影響を与えるコードの作成に意欲を示しています。
Raspberry PiにMCPI++を入れてみた
/** Geminiが自動生成した概要 **/
この記事は、Raspberry PiにMinecraft: Pi Edition: Reborn (マイクラリボーン) の拡張版をインストールする方法と、その拡張機能について解説しています。拡張版では、ブロックやアーマーの種類が増えるなどのアップデートがあります。インストールは、スクリプトを実行するだけで完了します。拡張版はマイクラリボーンの新バージョンに合わせて更新されるようです。
Minecraft: Pi Edition: Rebornでスキンを変更してみた

/** Geminiが自動生成した概要 **/
この記事は、Minecraft: Pi Edition: Rebornでスキンを変更する方法を解説しています。
まず、好みのスキンをダウンロードします。次に、標準のスキンのPNGファイル(char.png)をバックアップし、ダウンロードしたスキンで置き換えます。この際、ファイルパスに注意が必要です。
スキンを変更後、デザイン崩れが発生する場合は、Pythonスクリプト(minecraft_skin_fixer.py)を使用して修正します。スクリプト内のファイルパスを自身の環境に合わせて変更する必要があります。
修正後、Minecraft: Pi Edition: Rebornを再起動すると、スキンが変更されているはずです。
Rasbperry Piにゲームパッドを繋ぎ、マインクラフトを操作する

/** Geminiが自動生成した概要 **/
この記事は、Raspberry PiまたはUbuntuに接続したLogicool F310ゲームパッドを使用してMinecraft: Pi Edition: Rebornを操作する方法を解説しています。
Windows PC用のゲームパッドをLinux環境で動作させるため、joystickとjstest-gtkドライバをインストールします。jstestコマンドでゲームパッドが認識されていることを確認後、qjoypadをインストールし、GUIで各ボタンにキーボードやマウスの操作を割り当てます。
記事では、マイクラリボーン用に設定したボタン割り当てを紹介し、動作確認を行うよう促しています。
Minecraft: Pi Edition: Reborn on Ubuntu
/** Geminiが自動生成した概要 **/
記事では、子供向け科学雑誌に掲載された「Minecraft: Pi Edition: Reborn」(マイクラリボーン)を、Raspberry Piだけでなく、普段使いのUbuntuパソコンでも動作させた体験談を紹介しています。
記事では、マイクラリボーンがUbuntu 20.04以降で動作すること、amd64、arm64、armhfのdebファイルが配布されていることから、Intel Core i5搭載のUbuntuパソコンにインストールして動作確認を行ったことが記載されています。
その結果、Raspberry Pi版と同様に動作し、ローカルネットワーク経由で一緒に遊ぶこともできたと報告しています。
そして、この経験から、教育用パソコンにおけるARM、Debian、Pythonの重要性について、次回以降の記事で考察していくことを示唆しています。
コンピュータ二台でソケット通信を試す

/** Geminiが自動生成した概要 **/
この記事は、二台のコンピュータ間でローカルネットワークを通じてソケット通信を行う方法を解説しています。
まず、Raspberry Piをサーバー側にして、そのローカルIPアドレスを調べます。次に、Pythonで記述したサーバープログラムを、調べたIPアドレスを使って修正します。クライアント側にはLinuxマシンを使用し、同様にローカルIPアドレスを調べます。
その後、クライアントプログラムを実行し、サーバープログラムが実行されているRaspberry PiのIPアドレスとポート番号を指定して接続します。
記事では、接続が成功したことを確認後、NodeMCUとRaspberry Piでのソケット通信に進むことを示唆しています。
コンピュータ一台でソケット通信を試す
/** Geminiが自動生成した概要 **/
この記事では、マイコンを用いたデータ送信システム構築に向けて、まずは一台のPCでのソケット通信を試行しています。
具体的には、Pythonを用いて、受信側(サーバー)と送信側(クライアント)のプログラムを作成し、同一PC上で動作させています。
サーバー側はポート番号12345で接続を待ち受け、クライアント側からの接続があると、入力されたデータを受信し、"Successed!"というメッセージを返信します。
記事では、それぞれのプログラムのコード例と実行結果を示し、実際にデータの送受信が成功していることを確認しています。
今後は、2台のPC間でのソケット通信に挑戦する予定です。
NodeMCUにファームウェアをインストールする

/** Geminiが自動生成した概要 **/
ESP8266 NodeMCUモジュールにMicroPythonファームウェアをインストールするには、esptoolツールを使用します。ファームウェアのbinファイルをダウンロードし、`esptool`コマンドを使用してフラッシュを消去してから、新しいファームウェアを書き込みます。
ファームウェアがインストールされたら、Thonny IDEを使用してLチカプログラムを作成します。ThonnyをESP8266に接続し、`main.py`という名前でプログラムを保存します。プログラムを実行すると、NodeMCUのLEDが点滅します。
プログラミング教育で注目すべきはARM + Debian + Pythonであるはずだ

/** Geminiが自動生成した概要 **/
プログラミング教育の格差解消には、安価で高性能なARMアーキテクチャ搭載PCが有効である。Raspberry PiはDebian系OSとPythonを標準サポートし、電子工作から本格的な開発まで対応可能なため、ChromebookやMicro:bitよりも優れている。ARM対応ソフトの充実が課題だが、低価格でDebianやPythonに触れられる環境は、OSSやサーバー学習へのハードルを下げ、将来的なIT人材育成に貢献する。
Raspberry Piと赤色LEDでパルス幅変調を試す
/** Geminiが自動生成した概要 **/
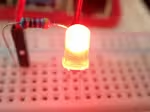
この記事は、生物系出身でRaspberry Piに挑戦している筆者が、パルス幅変調(PWM)を学ぶ過程を記述しています。
まず、LEDの点灯と消灯を繰り返すLチカを通して、HIGH(電気が流れる状態)とLOW(電気が流れない状態)について学びます。次に、PWMの概念、周期、パルス幅、デューティ比について解説し、PWMを用いたLEDの明るさ制御に挑戦します。
具体的なコード例を示しながら、デューティ比を徐々に上げることでLEDが明るくなる様子を観察し、PWMによる制御を体感します。最後に、HIGHはデューティ比100%の状態であり、デューティ比が低くても実際には高速で点滅しているため暗く見えることを補足しています。
Fritzingを使って、Raspberry Piの回路図を作成する

/** Geminiが自動生成した概要 **/
Fritzingというアプリを使えば、電子回路の回路図が簡単に作成できます。Raspberry Piなど、様々な電子部品がパーツとして用意されており、ドラッグ&ドロップで配置できます。標準パーツにない場合は、ネットから追加することも可能です。例えば、Raspberry Pi 4 Model Bのパーツは、フォーラムで共有されているfzpzファイルをダウンロードしてインポートすることで使用できます。
Raspberry Piのシリアルコンソールを試す

/** Geminiが自動生成した概要 **/
Raspberry Piのシリアルコンソール機能を使うと、ネットワーク環境がなくても有線でRaspberry Piを操作できます。
今回は、Raspberry Pi 4BとUbuntu 20.04、USB-TTLシリアルコンソールケーブルを使って接続を試みました。
Raspberry Pi側でシリアルポートとコンソールを有効化し、ケーブルで接続します。Ubuntu側ではscreenコマンドを使ってシリアルコンソールに接続します。
接続が確立すると、Ubuntuの端末にRaspberry Piのログイン画面が表示され、操作が可能になります。接続を終了するには、ctrl + a、kと入力します。
Raspberry PiでLCDに文字列を出力する

/** Geminiが自動生成した概要 **/
この記事では、Raspberry PiとI2C接続のLCDディスプレイを使って文字列を表示する方法を解説しています。
まず、Raspberry Piの設定でI2Cを有効化し、LCDのI2CモジュールをGPIOピンに接続します。接続が正しければ、「i2cdetect -y 1」コマンドでI2Cアドレスが表示されます。
次に、OSOYOOのライブラリ「i2clcda.py」を使ってPythonコードを作成し、LCDに文字列を表示します。コードでは、ライブラリをインポート後、「lcd_init()」でLCDを初期化し、「lcd_string()」関数で文字列と表示位置を指定して出力します。
表示されない場合は、I2Cモジュールのポテンショメータを調整してコントラストを調整する必要があります。
Rapberry PiとBBC Micro:bitでUARTを試す

/** Geminiが自動生成した概要 **/
Micro:bitとサーボモーターを使って環境制御の基礎を学ぶ記事。サーボモーターの角度制御をMicro:bitのプログラムから行う方法を紹介。Muエディタを使用し、角度を指定するシンプルなコードから、連続的な動きや特定角度への移動、アナログ入力による制御まで段階的に解説。具体的な接続方法やコード例、ライブラリの活用法も示し、初心者にも分かりやすくサーボモーター制御の基礎を習得できる内容となっている。最終的には、植物育成ライトの角度調整といった具体的な応用例も示唆し、環境制御への応用を促している。
Raspberry PiをChromebookから操作する
/** Geminiが自動生成した概要 **/
プログラミング教室でキーボード・ディスプレイ無しにRaspberry Piを使うため、ChromebookからVNC接続を試みた。Raspberry PiでVNCサーバーを有効化し、ChromebookにVNC Viewerをインストール、IPアドレス指定で接続に成功。しかし、ディスプレイ未接続時は起動時にウィンドウシステムが立ち上がらずエラー発生。解決策として、raspi-configで画面解像度を設定することで、ディスプレイ無しでもVNC接続できるようになった。
Raspberry Pi 4 Model Bを購入した
/** Geminiが自動生成した概要 **/
子供に初めて与えるPCとしてChromebookを検討していた筆者は、Micro:bitのシリアル通信の課題からRaspberry Pi 4 Model B(8GB)を購入。GPIOピンによる電子工作の可能性、安価でLinux学習に適した点を評価している。Raspberry Piはクレジットカード大の基盤に主要部品を搭載し、microSDカードにOSをインストールして使用する。高スペックゆえの発熱対策として冷却ファン付きケースも購入。Raspberry Piを子供用PCとするには、親のLinux(Debian系)知識やハードウェア管理の理解が必要と結論づけている。
おすすめの検索キーワード
おすすめの記事