/** Geminiが自動生成した概要 **/
2025年の振り返りとして、念願だった自宅での「親子で学ぶプログラミング教室」オープンが報告されました。妻が主体となり、補助金申請から生徒募集までを担当し、初年度の目標生徒数を達成。
本教室はmicro:bitを主要教材とし、小学生はMakeCode、希望する保護者はMicroPythonで学びます。特徴は、前半が小学生向け、後半が保護者向けの時間に分けられている点。保護者向けでは、当初予想に反して音響機器のIoT化やGPS機器の自作といった電子工作が人気でした。貸出PCにはRaspberry Pi 5やChromebookを用意。
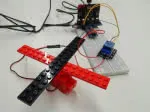
今後は、LEGOでのラジコンカー製作やIoT機器の仕組み学習を通じ、小さな街の再現を目指す計画です。