Micro:bitでサーボモータの止め方を試すの記事の続き。
サーボモータの動きがいまいち分からなかったので、
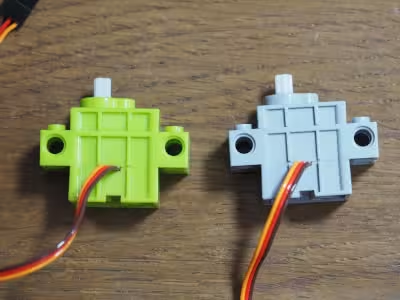
他のサーボモータを購入してみた。
色違いのように見えて、全然違う動きをする。

先に今まで使っていた緑の方に仕様を確認してみると、
Geekservo 9g 360°サーボ
起動電圧:2.5 V
動作電圧:3.3 - 6 V
公称電圧:4.8 V
公称電流:100 mA
拘束電流:550 mA
最大トルク:500 g.cm
※参考:Geekservo 9g 360°サーボ(LEGO互換) - ロボショップ
一方、新しく購入したものは
Geekservo 9g 270°サーボ
起動電圧:2.5 V
動作電圧:3.3 - 6 V
公称電圧:4.8 V
公称電流:100 mA
拘束電流:550 mA
最大トルク:500 g.cm
※参考:Geekservo 9g 270°サーボ(LEGO互換) - ロボショップ
前者の360°サーボモータには角度制御はなく、後者の270°サーボモータには角度制御があることが大きな違い。
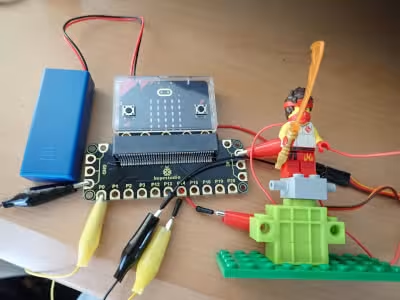
この二つのサーボモータに対して、

同じコードを試して、動きの違いを確認してみる。
前者の360°サーボモータを動かしてみると、どうやら角度は回転速度に影響を与えているようだ。
90°を基準にして、90°より大きくすると半時計回りで、90°よりも小さくすると時計回りになる。
後者の270°サーボモータは指定した角度に対してぴったりの角度で停止するようだ。
サーボモータと言えども、仕様によって動き方が異なってくるのね。
比べることで少しだけ理解が深まった。
ちなみに今回の動作確認の為に載せたミニフィグはLEG Ninjagoのコールにした。
Cole - LEGO Ninjago - Character Spot - YouTube