環境制御を学ぶ為にMicro:bitでサーボモータを学ぶの記事で、Micro:bitでサーボモータを動かすことは出来たけれども、回転しっぱなしで止められなかった。
というわけで、今回はサーボモータを止める方法を模索してみる。
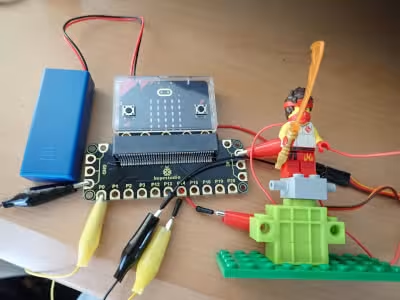
今回はブレットボードマニアックのケーキボードが届いたので、ケーキボードとジャンパー線で組んでみる。
※ケーキボードはブレットボードの一種
Micro:bitとケーキボードを繋ぐために、Vilrosの拡張ボードを購入した。
Vilros BBC Micro:bit Breadboard Adapter/Expansion Board | vilros.com - Vilros.com
ケーキボードや拡張ボードの使い方は本なりサイトなりで読めるのでここでは触れない事にして、話を先に進める。
今回は、

回転しているかをわかりやすくするために、LEGO Ninjagoのニャー(左)とジェイ(右)を載っける事にする。
Nya - LEGO Ninjago - Character Video - YouTube
前回の記事で、サーボモータの基準値が90であったので、下記のコードを試してみた。
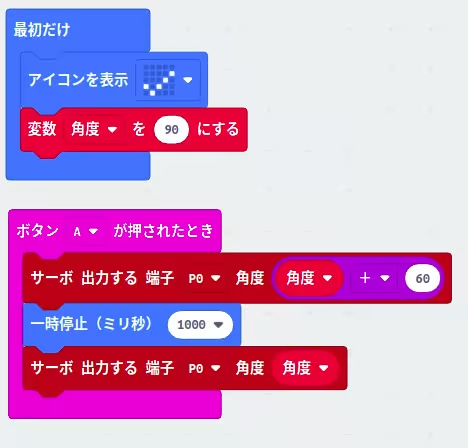
コードの意図はAボタンを押して半時計回りに動かした後、1秒待ってモータを止める。
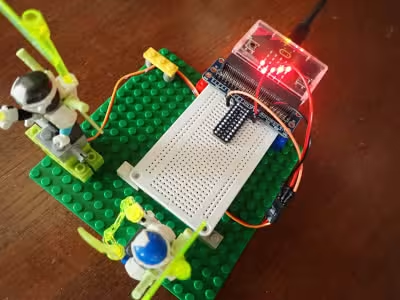
このコードをフラッシングして、動作を確認してみた。
意図通り、1秒後にモータは止まったけれども、P0の端子から指定した150度よりも多く回っているような…
現段階ではサーボモータに送る値はよくわからない。